
The goal of the HSL is to improve the understanding of human physiological and cognitive capabilities to optimize human-system effectiveness and to develop appropriate countermeasures and evidence-based engineering design criteria. Our research is interdisciplinary, utilizing techniques from:
- artificial intelligence
- biomechanics
- biostatistics
- cognitive psychology
- human factors
- manual and supervisory control
- sensory-motor physiology
- signal processing
- state estimation
A Sample of Current Research Topics
Evaluation of Neuromuscular Electrical Stimulation as a Bone Loss Countermeasure
Thomas Abitante

In order to increase the daily loading of the skeleton and subsequently reduce bone loss in microgravity, non-exercise based methods should be explored. Electrical Stimulation causes involuntary muscle contractions which in turn can place strain on bones. This project involves 1) determining the peak strains electrical stimulation can create on the femoral head, as a way to evaluate effectiveness in stimulating bone maintenance, 2) performing fatigue tests to aid in regimen design, and 3) determine the metabolic cost of such a regimen to ensure the countermeasure would not exacerbate the risk of excessive caloric expenditure.
Gravity Loading Countermeasure Skinsuit
Rachel Bellisle

The Gravity Loading Countermeasure Skinsuit (GLCS or “Skinsuit”) is an intravehicular activity suit for astronauts that has been developed to simulate some of the effects of Earth gravity. The GLCS produces a static load from the shoulders to the feet with elastic material in the form of a skin-tight wearable suit. The GLCS targets multiple physiological systems, aiming to mitigate spinal elongation, muscle atrophy, and sensorimotor changes. This wearable system is intended to supplement exercise during future missions to the moon and Mars (where space for large exercise equipment may be unavailable) and to further attenuate microgravity-induced physiological effects in current ISS mission scenarios.
sEMG based Motion Prediction
Brandon Koo

Modern exoskeletons notably lack what is often referred to as "fluency", a measure of seamlessness between human and exoskeleton. This low fluency is theorized to be caused by the innate nature of robotic system feedback; a control system can only sense, drive, and feedback useful interaction information so fast. Getting ahead of the motion through prediction of motion is expected to greatly increase fluency and thus increase exoskeleton efficiency and perceived user comfort. By sensing and processing surface electromyography (sEMG) data, this project aims to predict motion and drive hardware using this prediction to overcome the critical fluency problem in exoskeletons and many other human machine collaborative systems.
The Climate Pocket: Exploring Local Climate Impacts with Physics-informed Machine Learning
Bjorn Lutjens
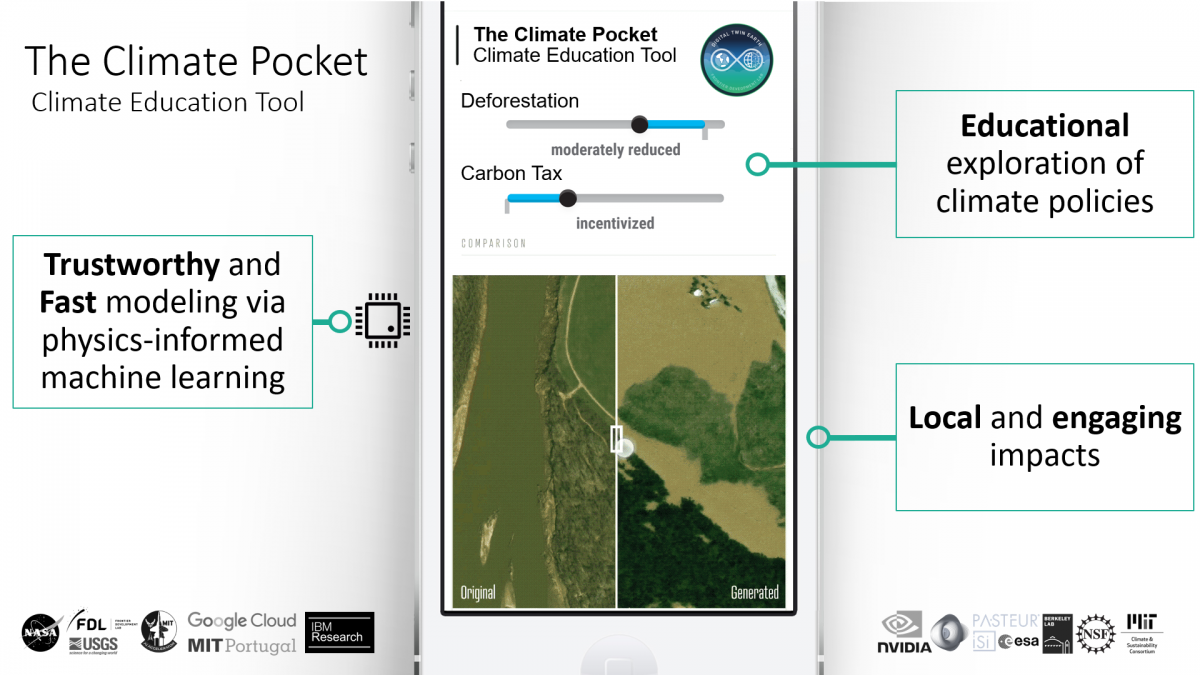
Decision-makers rely on climate models to understand and plan for changes in climate, but current climate models are computationally too expensive. Running a high-resolution (1km) climate model can take multiple weeks on the world's largest supercomputers; consuming the same electricity a coal power plant would generate in one hour. To overcome the computational complexity, we are reshaping machine learning models into fast copies, or 'surrogates', of climate models. The core difficulty is to ensure trust, which we are developing by guaranteeing physical-consistencies in the machine learning models. More at https://blutjens.github.io/.
Thermal Modeling and Design for a Seismo-Geodetic Ice Penetrator (SGIP)
Aaron Makikalli
SGIP is a helicopter-deployed seismo-geodetic ice penetrator designed to be kinetically embedded in the Ross Ice Shelf in Antarctica to collect data on Antarctic ice-ocean-atmosphere dynamics. My work primarily focuses on modeling the thermal environment experienced by SGIP and designing the thermal subsystem to ensure that internal components remain within operating temperature ranges without melting the surrounding ice. My secondary responsibilities include aerodynamic modeling and wind tunnel testing of the penetrator, as well as development of a black box drop recorder.